Тема экономики процесс гибели размножения. Процессы размножения и гибели. А. Постулаты пуассоновского процесса
ВИНТОВОЕ ДВИЖЕНИЕ
-
движение твёрдого тела, слагающееся из прямолинейного поступательного движения
с нек-рой скоростью
и
вращательного движения
с нек-рой угловой скоростью
вокруг оси аa
1 , параллельной направлению постулат. скорости
(рис. 1). Тело, совершающее стационарное В. д., т. е. В. д., при к-ром
направление оси aa 1
остаётся неизменным, наз. винтом; ось
аа 1
наз. осью винта; расстояние, проходимое любой точкой тела,
лежащей на оси аa
1 , за время одного оборота, наз. шагом h
винта, величина
- параметром винта. Если вектор
направлен в сторону, откуда вращение тела видно происходящим против хода часовой
стрелки, то при векторах
, направленных в одну сторону, винт наз. правым, а в разные стороны,- левым.


Скорость и ускорение любой
точки M
тела, отстоящей от оси аa
1 на расстоянии r
,
численно равны
Когда параметр р
постоянен,
шаг винта![]() также
постоянен. В этом случае всякая точка M
тела, не лежащая на оси aa
1 ,
описывает винтовую линию, касательная к к-рой в любой точке образует с плоскостью
yz
, перпендикулярной оси aa
1 , угол
Любое сложное движение твёрдого тела слагается в общем случае из серии элементарных
или мгновенных В. д. Ось мгновенного В. д. наз. мгновенной винтовой осью. В
отличие от оси стационарного В. д., мгновенная винтовая ось непрерывно изменяет
своё положение как по отношению к системе отсчёта, в к-рой рассматривается движение
тела, так и по отношению к самому телу, образуя при этом 2 линейчатые (соприкасающиеся
но прямой линии) поверхности, наз. соответственно неподвижным и подвижным аксоидами
(рис. 2). Геом. картину движения тела можно в общем случае получить качением
с продольным проскальзыванием подвижного аксоида по неподвижному, осуществляя
таким путём серию тех последоват. В. д., из к-рых слагается движение тела.
также
постоянен. В этом случае всякая точка M
тела, не лежащая на оси aa
1 ,
описывает винтовую линию, касательная к к-рой в любой точке образует с плоскостью
yz
, перпендикулярной оси aa
1 , угол
Любое сложное движение твёрдого тела слагается в общем случае из серии элементарных
или мгновенных В. д. Ось мгновенного В. д. наз. мгновенной винтовой осью. В
отличие от оси стационарного В. д., мгновенная винтовая ось непрерывно изменяет
своё положение как по отношению к системе отсчёта, в к-рой рассматривается движение
тела, так и по отношению к самому телу, образуя при этом 2 линейчатые (соприкасающиеся
но прямой линии) поверхности, наз. соответственно неподвижным и подвижным аксоидами
(рис. 2). Геом. картину движения тела можно в общем случае получить качением
с продольным проскальзыванием подвижного аксоида по неподвижному, осуществляя
таким путём серию тех последоват. В. д., из к-рых слагается движение тела.
движение твердого тела, как и движение точки, может быть сложным.
Пусть тело совершает некоторое движение относительно системы координат 0x 1 y 1 z 1 , которая, в свою очередь, движется относительно неподвижных осей 0xyz .Относительным движением тела называют его движение по отношению к подвижной системе координат 0x 1 y 1 z 1 . Для выяснения переносного движения тела в каждый момент времени следует считать тело жестко скрепленным с подвижной системой отсчета, и движение, которое будет совершать тело с подвижной системой отсчета относительно неподвижной системы, и будет переносным движением. Движение тела относительно неподвижной системы координат называетсяабсолютным .
Основной задачей кинематики сложного движения твердого тела является установление соотношений между кинематическими характеристиками абсолютного, относительного и переносного движений. Сложное движение твердого тела может состоять из поступательных и вращательных движений или может быть получено в результате сложения поступательного и вращательного движений. В некоторых задачах кинематики заданное сложное движение твердого тела раскладывают на составляющие движения (анализ); в других - требуется определить сложное движение как результат сложения более простых (синтез). Как при анализе, так и при синтезе движений речь идет о разложении и сложении движений, рассматриваемых в данный момент (мгновенных движений).
Сложение поступательных движений твердого тела
Пусть твердое тело одновременно участвует в двух мгновенно поступательных движениях, из которых одно является поступательным со скоростью v 1 , второе - переносным со скоростью v 2 (рис 2.73). Выделим какую-либо точку М тела. Найдем абсолютную скорость точки М
v a = v r + v e = v 1 + v 2 . (2.113)
Так как и относительное, и переносное движение твердого тела являются мгновенно поступательными, то относительные, переносные и, следовательно, согласно формуле (2.113), абсолютные скорости всех точек тела будут равны между собой в каждый момент времени (равны по величине и параллельны по направлению), т.е. абсолютное движение тела также является мгновенно поступательным.
Очевидно, что данный вывод применим к сложному движению твердого тела, состоящему из трех и более мгновенно поступательных движений, тогда в общем случае
Итак, в результате сложения мгновенных поступательных движений твердого тела результирующее движение получается мгновенно поступательным.
Замечание . Мгновенно поступательное движение твердого тела отличается от поступательного тем, что при поступательном движении в каждый момент времени равны между собой скорости и ускорения всех точек тела, а при мгновенно поступательном движении в данный момент времени равны между собой только скорости всех точек тела.
66, 67 Сложение вращений вокруг параллельных осей
Рассмотрим случай, когда относительное движение тела является вращением
с угловой скоростью вокруг оси , закрепленной на кривошипе (рис.1а), а переносное – вращением кривошипа вокруг оси , параллельной , с угловой скоростью . Тогда движение тела будет плоскопараллельным по отношению к плоскости, перпендикулярной к осям.
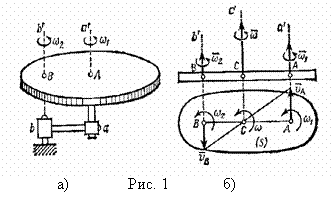
Примем, что вращения направлены в одну сторону. Изобразим сечение тела плоскостью, перпендикулярной осям (рис. 1 б). Следы осей в сечении обозначим буквами и . Тогда и . При этом векторы и параллельны друг другу, перпендикулярны и направлены в разные стороны. Тогда точка является мгновенным центром скоростей , а следовательно, ось , параллельная осям и , является мгновенной осью вращения. Для определения угловой скорости абсолютного вращения тела вокруг оси и положения самой оси, т.е. точки , воспользуемся свойством мгновенного центра скоростей
![]() .
.
Подставив в эти равенства значения и , окончательно получим
Итак, при сложении двух направленных в одну сторону вращений вокруг параллельных осей результирующее движение тела будет мгновенным вращением с абсолютной скоростью вокруг мгновенной оси, параллельной данным, положение которой определяется пропорциями (2).
С течением времени мгновенная ось вращения меняет свое положение, описывая цилиндрическую поверхность.

Рассмотрим теперь случай, когда вращения направлены в разные стороны (рис.2).
Допустим, что . Тогда, рассуждая, как в предыдущем случае, для угловой скорости абсолютного движения тела вокруг оси и положения самой оси, получим
Таким образом, при сложении двух направленных в разные стороны вращений вокруг параллельных осей, результирующее движение тела будет мгновенным вращением с абсолютной угловой скоростью вокруг мгновенной оси, положение которой определяется пропорциями (4).
Заметим, что в этом случае точка делит расстояние между параллельными осями внешним образом.
Рассмотрим частный случай, когда вращения вокруг параллельных осей направлены в разные стороны, но по модулю (рис.3).

Такая совокупность вращений называется парой вращений, а векторы и образуют пару угловых скоростей. В этом случае получим и , то есть = . Тогда мгновенный центр скоростей находится в бесконечности и все точки тела в данный момент времени имеют одинаковые скорости .
Следовательно, результирующее движение тела будет поступательным (или мгновенно поступательным) движением со скоростью, численно равной и направленной перпендикулярно плоскости, проходящей через векторы и . Таким образом, пара вращений эквивалентна мгновенно поступательному движению со скоростью , равной моменту пары угловых скоростей этих вращений.
Примером пары угловых скоростей является движение велосипедной педали относительно рамы велосипеда (рис.4).

Это движение представляет собой совокупность переносного вращения вместе с кривошипом вокруг оси и относительного вращения педали по отношению к кривошипу вокруг оси . Педаль за все время движения остается параллельной своему первоначальному положению, т.е. совершает поступательное движение.
Рассмотрим несколько примеров.
Пример 1. Кривошип вращается вокруг оси по часовой стрелке с угловой скоростью , а диск радиуса вращается вокруг оси по часовой стрелке с той же угловой скоростью относительно кривошипа. Найти величину и направление абсолютных скоростей точек и (рис.5).

Решение.
Так как угловые скорости переносного
и относительного вращений равны по
модулю и направлены в одну сторону, то
мгновенный центр вращений диска
лежит посредине между и ,
т.е. ![]() .
Модуль абсолютной угловой скорости вращения
диска вокруг точки равен .
Отсюда находим:
.
Модуль абсолютной угловой скорости вращения
диска вокруг точки равен .
Отсюда находим:
![]() , ,
, ,
![]() , .
, .

Пример 2. Кривошип вращается вокруг оси с угловой скоростью . На палец кривошипа свободно насажена шестерня радиуса , сцепленная с неподвижным зубчатым колесом радиуса . Найти абсолютную угловую скорость шестерни и ее угловую скорость относительно кривошипа (рис.6).
Решение.
Так как шестерня сцеплена с неподвижным
колесом, то абсолютная скорость
точки зацепления
шестерни с этим колесом равна нулю, т.е.
точка является
для шестерни мгновенным центром вращения.
Отсюда ![]() или ,
или ,
Заметим, что направление вращения шестерни совпадает с направлением вращения кривошипа.
Тогда абсолютную угловую скорость шестерни находим из равенства
Один из важнейших случаев цепей Маркова известен под названием процесса гибели и размножения. Этот процесс может быть с дискретным или непрерывным временем, а определяющее его условие состоит в том, что допускаются переходы только в соседние состояния.
Рассмотрим процесс гибели и размножения с непрерывным временем. Такой процесс является моделью изменений в численности популяции.
Процесс находится в состоянии Ей, если объем (численность) популяции равен к; переход в состояние Ек соответствует гибели одного члена популяции, а переход в состояние Ек+ - рождению.
Этот процесс можно рассматривать как модель СМО, в которой Ек соответствует к заявок в системе, а переход в состояние Ек- или Ек+ - уходу заявки из системы или ее приходу.
Для процесса гибели и размножения с множеством состояний 0, 1,2, ... должны выполняться следующие условия:
Здесь P(+i; bt; к) - вероятность i рождений за время bt при условии, что численность популяции равна к ; P(-i; bt; к) - вероятность i гибелей при тех же условиях.
Согласно этим условиям кратные рождения, кратные гибели и одновременные рождения и гибели в течение малого промежутка времени запрещены в том смысле, что вероятность этих кратных событий имеет порядок малости о(6г). Это свойство вытекает из свойства экспоненциального распределения, как было показано ранее.
Найдем вероятность того, что объем популяции в некоторый момент времени равен к р(к, t) = P.
Рассмотрим изменение объема популяции в промежутке времени (t, t + 5/). В момент времени t + bt процесс будет находиться в состоянии Ек, если произошло одно из трех взаимно исключающих друг друга и образующих полную группу событий:
- 1) в момент времени t объем популяции равнялся А: и за время bt состояние не изменилось;
- 2) в момент времени t объем популяции равнялся к - 1 и за время bt родился один член популяции;
- 3) в момент времени t объем популяции равнялся к + 1 и за время bt погиб один член популяции.
Тогда вероятность того, что в момент времени t + bt процесс будет находиться в состоянии Ек, равна
Приведенное равенство имеет смысл только при к > О, поскольку популяция не может состоять из (-1) члена. Граничное равенство при к = О имеет вид:
Кроме того, должно выполняться условие нормировки
Выделяя в уравнениях (49.3) и (49.5) р(к) и деля на Ьк получим

Переходя к пределу при bt -> 0, имеем:
Таким образом, рассматриваемый вероятностный процесс описывается системой линейных дифференциальных уравнений. Эти уравнения можно получить непосредственно на основе диаграммы состояний (рис. 49.2).

Рис. 49.2.
Состояние Ek обозначается овалом, в котором записывается число к. Переходы между состояниями обозначаются стрелками, на которых представлены интенсивности переходов.
Разность между интенсивностью, с которой система попадает в состояние Ek, и интенсивностью, с которой она покидает его, должна равняться интенсивности изменения потока в этом состоянии.
Интенсивность потока в состояние
Интенсивность потока из состояния ~
![]()
Разность между ними равна эффективной интенсивности потока вероятностей в состояние
Решение этой системы в общем виде невозможно. Модель даже простой системы является чрезвычайно сложной и трудно анализируемой. Если рассматривать СМО более сложного вида, то вычислительные трудности будут еще более высокими. Поэтому обычно рассматривают решения системы (49.3) - (49.4) в установившемся режиме при t -> оо, р"(к; t) -> 0,р(к, t) -> р{к) = const.
Процесс чистого размножения
Для этого процесса р*=О, А* = А = const. Его можно рассматривать как модель потока заявок, поступивших в СМО. Система уравнений для этого процесса имеет вид:
Пусть начальные условия следующие:
Тогда
![]() и при к=
1 получим:
и при к=
1 получим:
![]() ехр
ехр
Решение этого уравнения естьр (; /) = А/ exp (-АД По индукции можно получить, что
Таким образом, вероятности распределены по закону Пуассона.
Процесс Пуассона занимает центральное место в исследованиях СМО. Это связано, во-первых, с его упрощающими аналитическими и вероятностными свойствами; во-вторых, он описывает многие реальные процессы, являющиеся следствием совокупного эффекта большого числа индивидуальных событий.
Марковский процесс с дискретными состояниями называется процессом гибели и размножения , если все состояния можно вытянуть в цепочку, в которой каждое из промежуточных состояний может переходить только в соседние состояния, а крайние состояния переходят лишь в состояния и соответственно. Граф состояний такой системы приведен на рис.4.
Название схемы взято из биологических задач, где состояние популяции означает наличие в ней особей.
На рис.4 переход вправо соответствует увеличению популяции, влево - ее уменьшению. Таким образом, можно определить как интенсивности размножения, а - как интенсивности гибели. Используется следующее соглашение: буквам и приписывается индекс того состояния, из которого выходит стрелка.
Марковским процессом гибели и размножения с непрерывным временем называется такой случайный процесс, исследуемый параметр которого может принимать только целые неотрицательные значения. Изменения рассматриваемого параметра могут происходить в любой момент времени, т.е. в любой момент времени он может либо увеличиться, либо уменьшиться на единицу.
Процессом чистого размножения называется такой процесс, у которого интенсивности всех потоков гибели равны нулю; аналогично процессом чистой «гибели» называется процесс, у которого равны нулю интенсивности всех потоков размножения.
Предельные (финальные) вероятности состояний для простейшего эргодического процесса гибели и размножения, находящегося в стационарном режиме, определяются по следующим формулам:

В качестве примера решения системы уравнений схемы гибели и размножения рассмотрим эксплуатацию автомобилей в крупной транспортной фирме.
Интенсивность поступления автомобилей на предприятие равна. Каждый поступивший на предприятие автомобиль списывается через случайное время. Срок службы автомобиля распределен по показательному закону с параметром. Процесс эксплуатации автомобилей является случайным процессом. - число автомобилей данной марки, находящихся в эксплуатации в момент времени.
Рассмотрим два случая: 1) нет ограничений на число эксплуатируемых автомобилей, 2) на предприятии может эксплуатироваться не более автомобилей.
Если в начальный момент на предприятии не было ни одного автомобиля, то решать систему уравнений нужно при начальных условиях:
Аналогично, если при эксплуатировалось автомобилей, то начальные условия имеют вид:
Решение системы дифференциальных уравнений Колмогорова при произвольном виде функции не может быть найдено в аналитическом виде. Однако при постоянных интенсивностях потоков гибели и размножения и конечном числе состояний будет существовать стационарный режим. Система в этом случае является простейшей эргодической системой.
Если интенсивности потока поступления и списания автомобилей постоянны, то оказываются справедливы формулы:
1. Максимальное число автомобилей не ограничено:

2. Математическое ожидание (среднее значение) числа эксплуатируемых автомобилей.
В предыдущем параграфе мы убедились, что зная размеченный граф состояний системы, можно сразу написать алгебраические уравнения для предельных вероятностей состояний. Таким образом, если две непрерывные цепи Маркова имеют одинаковые графы состояний и различаются только значениями интенсивностей λ ij , то нет надобности находить предельные вероятности состояний для каждого из графов в отдельности: достаточно составить и решить в буквенном виде уравнения для одного из них, а затем подставить вместо λ ij , соответствующие значения. Для многих часто встречающихся форм графов линейные уравнения легко решаются в буквенном виде.
Рис. 29
В данном параграфе мы познакомимся с одной очень типичной схемой непрерывных марковских цепей – так называемой «схемой гибели и размножения».
Марковская непрерывная цепь называется «процессом гибели и размножения», если ее граф состояний имеет вид, представленный на рис.29, т. е. все состояния можно вытянуть в одну цепочку, в которой каждое из средних состояний (S 2 , ..., S n –1) связано прямой и обратной связью с каждым из соседних состояний, а крайние состояния (S 1 , S n) – только с одним соседним состоянием.
Пример 1. Техническое устройство состоит из трех одинаковых узлов; каждый из них может выходить из строя (отказывать); отказавший узел немедленно начинает восстанавливаться. Состояния системы нумеруем по числу неисправных узлов:
S 0 – все три узла исправны;
S 1 – один узел отказал (восстанавливается), два исправны;
S 2 – два узла восстанавливаются, один исправен;
S 3 – все три узла восстанавливаются.
Граф состояний показан на рис.30. Из графа видно, что процесс, протекающий в системе, представляет собой процесс «гибели и размножения».
Рис. 30
Схема гибели и размножения очень часто встречается в самых разнообразных практических задачах; поэтому имеет смысл заранее рассмотреть эту схему в общем виде и решить соответствующую систему алгебраических уравнений с тем, чтобы в дальнейшем, встречаясь с конкретными процессами, протекающими по такой схеме, не решать задачу каждый раз заново, а пользоваться уже готовым решением.
Итак, рассмотрим случайный процесс гибели и размножения с графом состояний, представленным на рис.31
Рис. 31
Напишем алгебраические уравнения для вероятностей состояний. Для первого состояния S 1 имеем:
λ 12 p 1 = λ 21 p 2 (7.1)
Для второго состояния S 2 суммы членов, соответствующих входящим и выходящим стрелкам, равны:
λ 23 p 2 + λ 21 p 2 = λ 32 p 3 + λ 12 p 1
Но, в силу (7.1), можно сократить справа и слева равные друг другу члены и; получим:
λ 23 p 2 = λ 32 p 3
λ 34 p 3 = λ 43 p 4
. . . . . . . . .
Одним словом, для схемы гибели и размножения члены, соответствующие стоящим друг над другом стрелкам, равны между собой:
λ k -1,k p k -1 = λ k,k -1 p k (7.2)
где k принимает все значения от 2 до n.
Итак, предельные вероятности состояний р 1 , р 2 , ..., р n в любой схеме гибели и размножения удовлетворяют уравнениям:
λ 12 p 1 = λ 21 p 2
λ 23 p 2 = λ 32 p 3
λ 34 p 3 = λ 43 p 4
. . . . . . . . . . . (7.3)
λ k -1,k p k -1 = λ k,k -1 p k
. . . . . . . . . . .
λ n -1, n p n -1 = λ n , n -1 p n
и нормировочному условию:
р 1 + р 2 + ... + р n = l (7.4)
Будем решать эту систему следующим образом: из первого уравнения (7.3) выразим р 2:
Из второго, с учетом (7.5), получим:
![]() (7.6)
(7.6)
Из третьего, с учетом (7.6):
![]()
 (7.7)
(7.7)
Эта формула справедлива для любого k от 2 до n .
Обратим внимание на ее структуру. В числителе стоит произведение всех плотностей вероятности перехода (интенсивностей) λ ij , стоящих у стрелок, направленных слева направо, с начала и вплоть до той, которая идет в состояние Sk ; в знаменателе – произведение всех интенсивностей λ ij , стоящих у стрелок, идущих справа налево, опять-таки, с начала и вплоть до стрелки, исходящей из состояния S k . При k =n в числителе будет стоять произведение интенсивностей λ ij , стоящих у всех стрелок, идущих слева направо, а в знаменателе – у всех стрелок, идущих справа налево
Итак, все вероятности р 1 , р 2 , ..., р n выражены через одну из их: p 1. Подставим эти выражения в нормировочное условие: р 1 + р 2 + ... + р n = l Получим:

Остальные вероятности выражаются через p 1:
 (7.9)
(7.9)
Таким образом, задача «гибели и размножения» решена в общем виде: найдены предельные вероятности состояний.
Пример 2. Найти предельные вероятности состояний для процесса гибели и размножения, граф которого показан на рис. 32.

Рис. 32
Решение. По формулам (7.8) и (7.9) имеем:

Пример 3. Прибор состоит из трех узлов; поток отказов – простейший, среднее время безотказной работы каждого узла равно . Отказавший узел сразу же начинает ремонтироваться; среднее время ремонта (восстановления) узла равно ; закон распределения этого времени показательный (поток восстановлений простейший). Найти среднюю производительность прибора, если при трех работающих узлах она равна 100%, при двух – 50%, а при одном и менее – прибор вообще не работает.
Решение. Перечень состояний системы и граф состояний уже приводились в примере 1 данного параграфа. Разметим этот граф, т. е. проставим у каждой стрелки соответствующую интенсивность λ ij (см. рис. 33.).

Рис. 33.
Так как поток отказов каждого узла – простейший, то промежуток времени между отказами в этом потоке распределен по показательному закону с параметром , где –среднее время безотказной работы узла.
По стрелкам вправо систему переводят отказы. Если система находится в состоянии S 0 , то работают три узла; каждый из них подвергается потоку отказов с интенсивностью ; значит, поток отказов, действующий на всю систему, в три раза более интенсивен: = 0,5 и
Средняя производительность прибора в установившемся режиме:
Номинала.
Происхождение термина «схема гибели и размножения» ведет начало от биологических задач, где подобной схемой описывается процесс изменения численности популяции
